导言:
对于学习控制的同学来说,PID算法是我们非常常用的一种闭环反馈算法,我们常说的电机速度环,位置环,无人机的高度环,姿态环,都是利用嵌套的PID算法来实现的,但是明白原理很简单,上手还是比较难的,正好我们调试电机的任务中用到了PID算法,我们可以试一试手写一个PID算法,来让大家对PID有一个深刻的理解。
首先,我们要让一个系统趋于稳定,就要引入负反馈机制。打个简单的比方,如果闭着眼睛走路的话,就会撞墙,但是如果眼睛把墙的位置反馈给我们的话,我们就可以通过我们大脑来处理信息,绕过前面的墙
我们先理解一下负反馈是怎么帮我们实现自动控制的。还是上面那个例子,我们想向门走去,我们需要眼睛给我们反馈三个信息。
- 第一个是我们现在的距离和墙距离的差值,
- 第二个是我们在前几秒和墙位置的差值,因为根据两点一线原则,我们就可以通过历史位置来判断我们和墙的具体关系
- 最后一个信息就是我们向门走去的速度,这样就可以方便我们调节绕墙的速度。
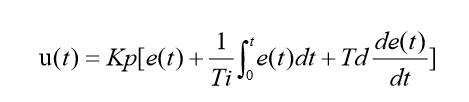
我们把现在的位置信息反馈叫做P(比例),过去的位置信息累加叫做I(积分),速度也就是变化率信息叫做D(微分),这样我们就发现,这三个数据就是我们PID的三个字母。
以上PID公式就可以实现我们的闭环反馈,但是如何将我们的公式转换成代码呢?不同的代码表达决定了我们采用位置式PID还是增量式PID。
位置式PID:
首先我们先讲讲位置式PID。
e(k)是我们设定值和当前值的一个偏差,Σe(i)是我们开机开始偏差的一个求和,最后一个e(k)-e(k-1)就是近两次误差的差值
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
| typedef struct {
float P,I,D,limit
}PID;
typedef struct Error{
float Current_Error;
float Last_Error;
float Previous_Error;
}Error ;
float PID_Realize(Error *sptr,PID *pid,int32 NowPlace,float Point){
int32 iError,
Realize;
iError=Point-NowPlace;
sptr->Current_Error+=pid->I*iError;
sptr->Current_Error=sptr->Current_Error>pid->limit?pid->limit:sptr->Current_Error;
sptr->Current_Error=sptr->Current_Error<pid->limit?pid->limit:sptr->Current_Error;
Realize=pid->P*iError
+sptr->Current_Error
+pid->D*(iError-sptr->Last_Error);
sptr->Last_Error=iError;
return Realize;
}
|
增量式在位置式的基础上进行了又一次作差,也就是算了两次位置反馈量的差作为反馈量,在式子中间的积分项中,积分的Σ被除去了,留下的是一个单值,之前位置式那种设最大阈值的方法被取消,每次的修正值只与过去的三个参数有关,更加具有实时性。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
| typedef struct {
float P,I,D,limit
}PID;
typedef struct Error{
float Current_Error;
float Last_Error;
float Previous_Error;
}Error ;
float PID_Increase(Error *sptr,PID *pid,int32 NowPlace,float Point){
int32 iError,
Increase;
iError=Point-NowPlace;
Increase=pid->P*(iError- sptr->Last_Error)
+pid->I*iError
+pid->D*(iError-2*sptr->Last_Error+sptr->Previous_Error);
sptr->Previous_Error=sptr->Last_Error;
sptr->Last_Error=iError;
return Increase;
}
|
位置式PID优缺点:
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
增量式PID优缺点:
优点:
①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差;
②溢出的影响大。有的被控对象用增量式则不太好。
附录:
纯纯2022年电赛使用的pid的bsp
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
|
void pid_init(pid_struct_t *pid,
float kp,
float ki,
float kd,
float i_max,
float out_max)
{
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->i_max = i_max;
pid->out_max = out_max;
}
float pid_calc(pid_struct_t *pid, float ref, float fdb)
{
pid->ref = ref;
pid->fdb = fdb;
pid->err[1] = pid->err[0];
pid->err[0] = pid->ref - pid->fdb;
pid->p_out = pid->kp * pid->err[0];
pid->i_out += pid->ki * pid->err[0];
pid->d_out = pid->kd * (pid->err[0] - pid->err[1]);
if(pid->i_out > pid->i_max)
{
pid->i_out = pid->i_max;
}
pid->output = pid->p_out + pid->i_out + pid->d_out;
if(pid->output > pid->out_max)
{
pid->output = pid->out_max;
}
else if(pid->output < -(pid->out_max))
{
pid->output = -(pid->out_max);
}
return pid->output;
}
|