
一些兴趣使然的FreeRTOS笔记(一)
导言
本帖记录一些有关freertos内核的一些冷门的知识以及一些代码解读(不间断更新)
大部分文案借鉴《USING THE FREERTOS REAL TIME KERNEL A Practical Guide》由Richard Barry所著
笔记
软实时和硬实时
软实时:计算机对每个输入的响应应当限定在一个恰当的时间范围——但是如果响应时间超出了限定范围,并不会让人觉得这台电脑无法使用。
硬实时:硬实时功能必须在给定的时间限制之内完成——如果无法做到即意味着整个系统的绝对失败
线程和任务
在 FreeRTOS 中,每个执行线程都被称为”任务”。
xTaskCreate的一些注意事项
应用程序可以通过定义常量 config_MAX_TASK_NAME_LEN 来定
义任务名的最大长度——包括’\0’结束符。如果传入的字符串长度超
过了这个最大值,字符串将会自动被截断。
usStackDepth 值用于告诉内核为它分配多大的栈空间。
这个值指定的是栈空间可以保存多少个字(word),而不是多少个字
节(byte)。
好用但不常用的用法
1 | /* 定义将要通过任务参数传递的字符串。定义为const,且不是在栈空间上,以保证任务执行时也有效。 */ |
奇怪的术语“饿死”
任务2的优先级比任务1高,并且总是可运行,因此任务2是唯一一个一直处于运行态的任务。而任务1不可能进入运行态,所以不可能输出字符串。这种情况我们称为任务1的执行时间被任务2”饿死(starved)”了。
这种”不停处理”类型的任务限制了其有用性,因为它们只可能被创建在最低优先级上。如何它们运行在其它任何优先级上,那么比它们优先级更低的任务将永远没有执行的机会。
解法:采用事件驱动任务
定时事件和同步事件
- 定时(时间相关)事件——这类事件可以是延迟到期或是绝对时间到点。比如说某个任务可以进入阻塞态以延迟 10ms。
- 同步事件——源于其它任务或中断的事件。比如说,某个任务可以进入阻塞态以等待队列中有数据到来。同步事件囊括了所有板级范围内的事件类型。
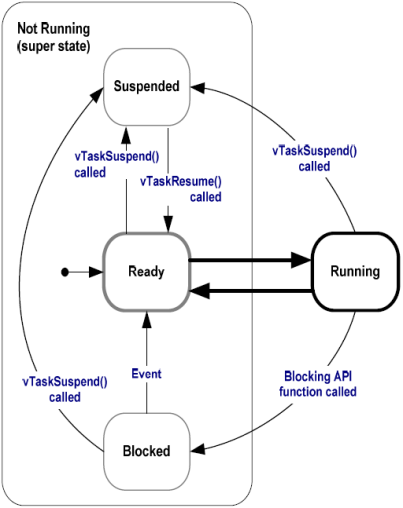
一些更加清晰的状态转移图片
用vTaskDelay代替空循环
常数 portTICK_RATE_MS 可以用来将以毫秒为单位的时间值转
换为以心跳周期为单位的时间值。vTaskDelay( 250 / portTICK_RATE_MS );
vTaskDelayUntil 高级用法
1 | void vTaskFunction( void *pvParameters ) |
空闲任务的钩子函数
1 | /* Declare a variable that will be incremented by the hook function. */ |
- 前提是将configUSE_IDLE_HOOK 必须定义为 1
任务修改的一些常用函数
1 | void vTaskPrioritySet( xTaskHandle pxTask, unsigned portBASE_TYPE uxNewPriority );//修改函数 |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Yoghurtcc's Blog!




